
Hi! I’m Huayan Zhang, a PhD student in Cloud Robotics Laboratory.
My research interests include SLAM and vision-based measurement.
News
- 2024.01: The website was established!
Publications
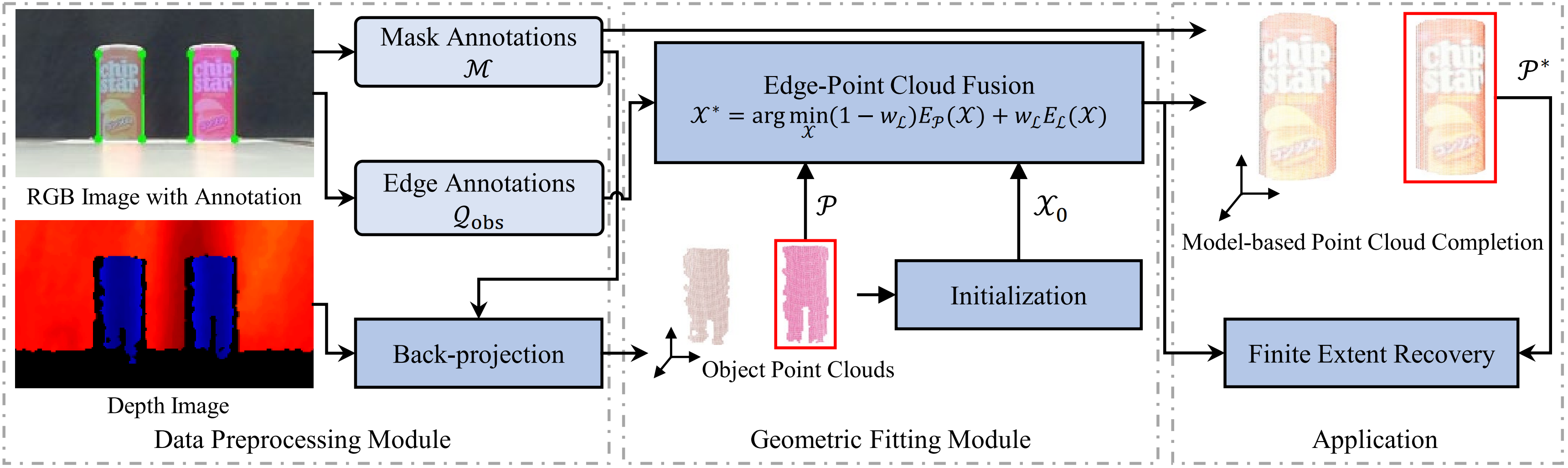
Edge–Point Cloud Fusion for Geometric Fitting of Cylinder Parameters Using Single-View RGB-D Data
Huayan Zhang, Jiaxin Liu, Zhongkui Wang
Sensors, 2026
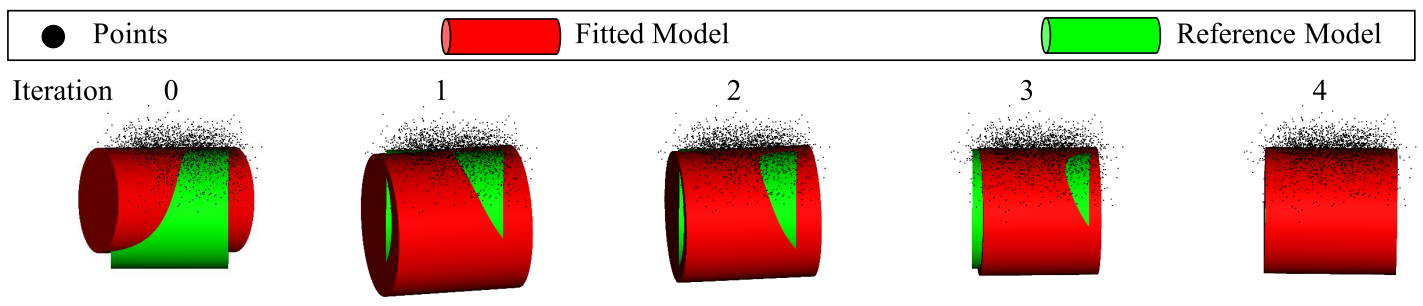
We propose an edge–point cloud fusion method for cylinder fitting from single-view RGB-D data. By incorporating 2D image-edge constraints with 3D point cloud information in a unified optimization framework, our method reduces the effect of point cloud noise and improves fitting accuracy and robustness.
Cylinder Fitting Using Orthonormal Representation in Noisy Point Clouds
Huayan Zhang, Yang Tian, Shugen Ma, Zhongkui Wang
IEEE Transactions on Instrumentation and Measurement, 2025
We propose a least-squares cylinder fitting method for noisy point clouds. By reformulating the fitting problem with an orthonormal representation and adopting a coarse-to-fine joint optimization strategy, our method improves fitting accuracy and robustness under noisy conditions significantly.
Education
- 2022.09 - Present, PhD Student, Ritsumeikan University, Japan.
- 2017.09 - 2020.06, Master, Beijing University of Civil Engineering and Architecture, Beijing, China.
- 2013.09 - 2017.06, Bachelor, Beijing University of Civil Engineering and Architecture, Beijing, China.
Work Experience
- 2021.10 - 2022.09, SLAM algorithm engineer, Xiaomi Inc., China.
- 2020.07 - 2021.09, Research assistant, Shenzhen Institute of Artificial Intelligence and Robotics for Society, China.
Honors and Awards
- 2020 Beijing Outstanding Graduates (Top 5%)
- 2020 Outstanding Graduate Thesis Award at School Level (Top 5%)
- 2019 National Scholarship for Postgraduates (Top 5%)